
碰撞检测算法
总览
为了在游戏的每一帧中检测球体的碰撞,以便更新球体的状态,我们需要设计高效的碰撞检测算法。因此,我们设计了四种碰撞检测算法,并将它们封装成以下四类。下面仅介绍算法相关结果,更多细节请查看源码。
算法介绍
四种算法的介绍和理论时间复杂度如下:
ExhaustiveCollisionDetection:

暴力解法,其中 n 表示球的总数,m 表示要询问的球数。
PrecisionCollisionDetection:
卡精度解法。其中 n 表示球的总数,m 表示要询问的球数,k 表示我们设置的精度,p 表示实际碰撞的球体数量。
RebuildQuadTreeCollisionDetection:
重建四叉树解法。其中 n 表示球的总数,m 表示要询问的球数,p 表示实际碰撞的球体数量。
RemoveQuadTreeCollisionDetection:
优化后的重建四叉树解法,增加了对四叉树的删除和维护。其中n表示球的总数,m表示要询问的球数,r表示位置状态发生变化的球体数量,p表示实际碰撞的球体数量。
为了测试这些算法的效率,我们修改了球总数、查询数、改变球数、迭代轮数等参数来设置测试场景。下表中的数据来自最具代表性的场景:
T:地图中所有球的数量
Q:查询球的数量,通常表示地图中移动的球
C:需要修改的球的数量,即碰撞次数
Exhaustive | Precision | Rebuild QuadTree | Remove QuadTree | |
|---|---|---|---|---|
T=3000 Q=300 C=600 | 688ms | 14ms | 47ms | 48ms |
T=3000 Q=300 C=1500 | 1067ms | 16ms | 50ms | 178ms |
T=10000 Q=1000 C=2000 | 8384ms | 61ms | 339ms | 497ms |
T=10000 Q=2000 C=5000 | 12426ms | 86ms | 586ms | 2460ms |
T=30000 Q=6000 C=3000 | 127000ms | 403ms | 5691ms | 8419ms |
为了更直观的看到每种算法的优劣,我们整合了测试数据,绘制了四种算法和各种参数的图表如下:
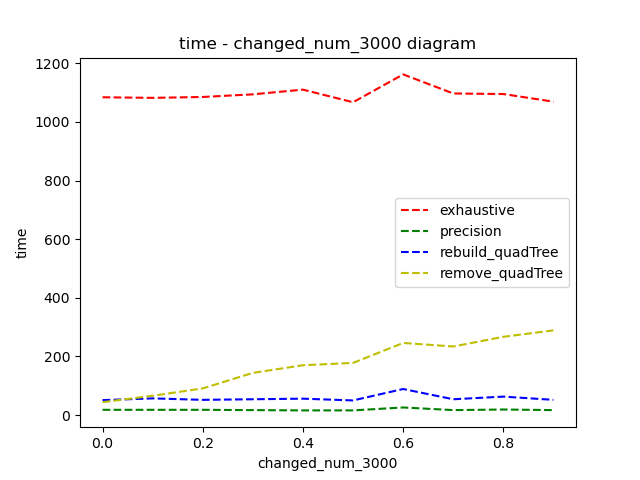
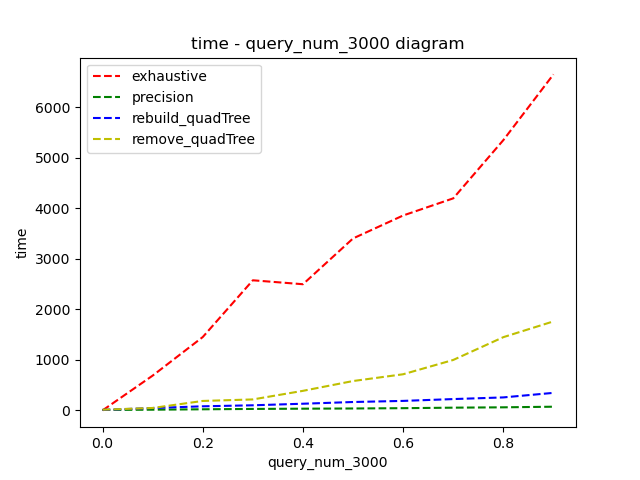
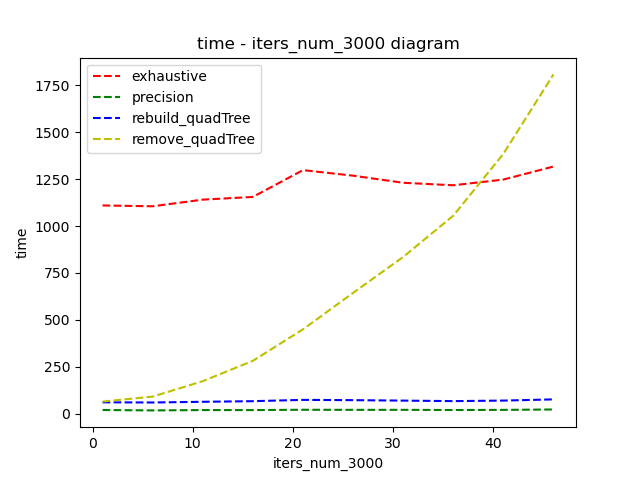
根据结果,我们可以认为 PrecisionCollisionDetection 算法在效率和稳定性方面都远远优于其他算法。


