
顶点
参考
| 模式: | 物体模式 |
|---|---|
| 面板: | 属性编辑器(Properties) ‣ 物体(Object) ‣ 实例化(Instancing) |
实例顶点 允许在父级物体每个顶点的位置复制子级物体。
Note
父级和子级物体的关联 物体原点 位置决定了实例化几何体与父级顶点的偏移。
对齐到顶点法线
根据父级网格的相应顶点法线来旋转实例化物体。
选择子级物体然后在 属性编辑器(Properties) ‣ 物体(Object) ‣ 关系(Relations) 面板中改变 跟踪轴(Tracking Axes) ,可改变实例化物体的方向的轴向。
有两种建模情形需要用到实例化顶点。它们可以当作排列工具使用,允许模拟物体的几何排列(例如希腊神殿的石柱、公园里的树、机器人军队、教室里的课桌等)。这些物体可以是blender所支持的任何物体类型。第二种方法是使用它们从物体的一个部分开始对物体进行建模(例如狼牙棒上的刺、海胆上的刺、墙上的瓷砖、花瓣)。
Note
下载示例blend文件
你可以在此页下载示例文件。在 这个blend 中,第一个例子,一只猴子父级关联到了层1的圆环, 一个触手父级关联到了层2的一个棱角球。
用法
实例化顶点来作为排列管理工具
你需要一个基本物体(例如 树 或者 罗马柱)和一个你想要的形状的样式网格。在此情景,我们将使用一个简单场景来演示。我们将使用位置在坐标原点的猴头作为基本物体,以及一个处在同一位置的圆环作为父级网格。
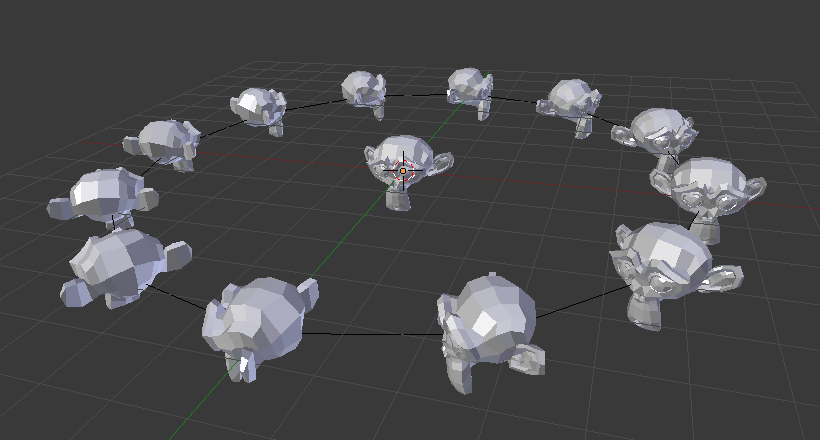
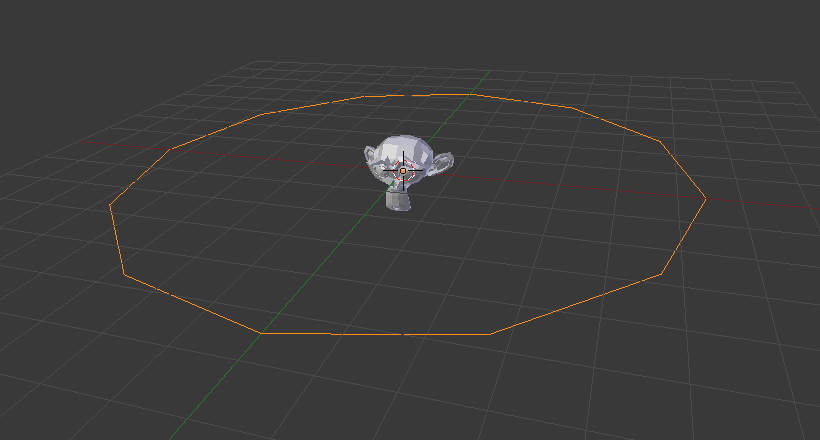 一个猴头和一个圆环。 | 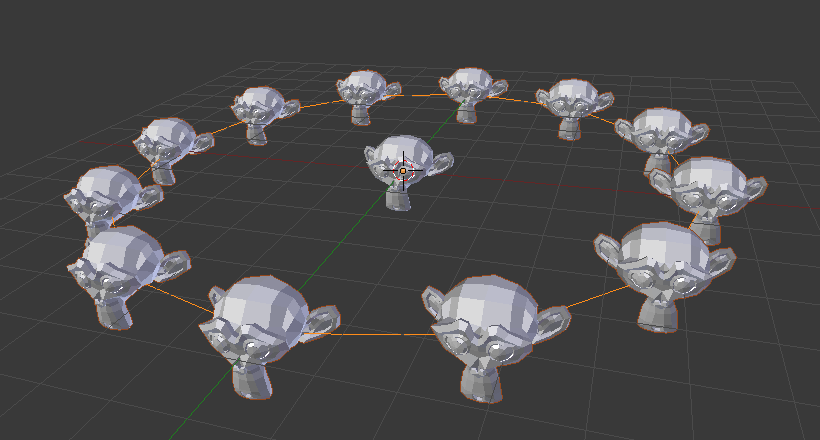 在顶点上实例化猴子。 |
首先,在 物体模式 中,选择基本物体并按 Shift-RMB 将圆环增加到选择对象中(顺序非常重要),并按 Ctrl-P 或 物体(Object) ‣ 父级(Parent) ‣ 到物体(Object) 来设置基础物体父级为圆环。至此,圆环是猴子的父级;如果你移动圆环,猴子也会跟随移动。
仅选择圆环,开启 实例化顶点 ;圆环的每个顶点将被对应的一个猴头替代。
中心的原始猴头和父网格仍然显示在3D视图中,但都不会渲染。如果猴头的替换行为和旋转比较怪异,你也许需要按 Alt-R 清除旋转数据, Alt-S 清除缩放数据, Alt-G 清除坐标数据,和 Alt-O 原点归位。
重新排列
如果你在物体模式或编辑模式选择基本物体并修改它,所有改动将影响到所有实例化物体的形状。你也可以选择父级物体来修改实例物体的排列;增加父级物体顶点也会导致增加实例物体。
请注意,在物体模式下,而不是在编辑模式下,基础对象将继承对父网格所做的更改。 因此,在物体模式下缩放圆圈将扩大猴头,而在编辑模式下缩放圆圈只会增加基础物体之间的距离。
方向
可以通过开启 实例化 面板中的 对齐到顶点法线 来控制基本物体的方向。所有基本物体的旋转将取决于父级物体网格的顶点法线方向。
要改变实例化物体的方向,选择基本物体并在 属性编辑器(Properties) ‣ 物体(Object) ‣关系(Relations) 面板中该改变 跟踪轴向 。
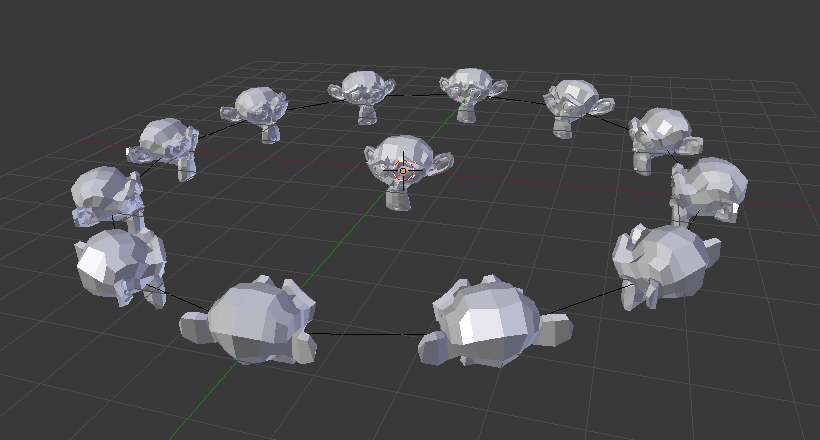 开启方向,方向为+Y。 | 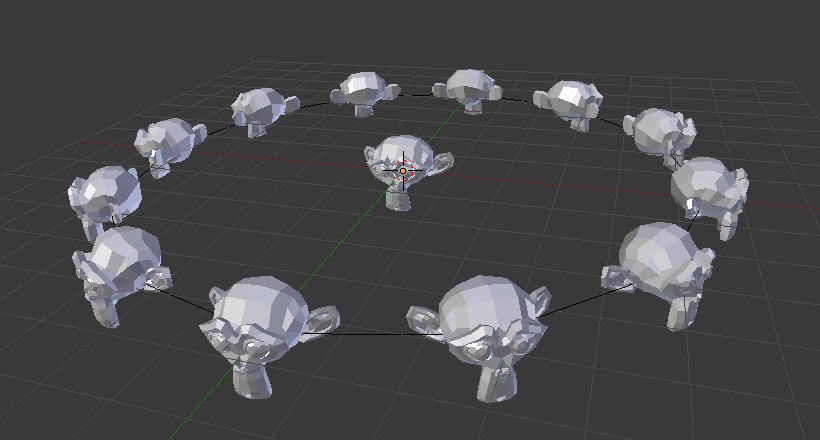 -Y。 |
 +X. | 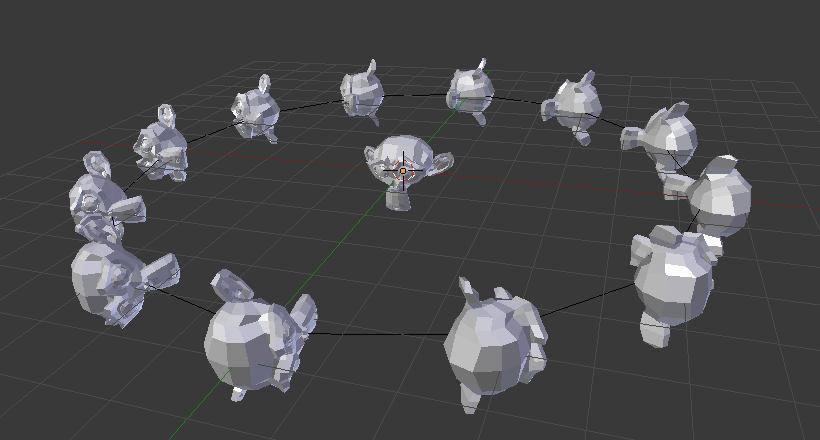 -Z,X朝上。 |
Note
物体轴向显示开关可以在 属性编辑器(Properties) ‣ 物体(Object) ‣ 视图显示(Viewport Display) 面板中找到。要显示父级网格的顶点法线,进入 编辑模式 并点亮右上角的 视图叠加(Viewport Overlays) ‣ 法向(Normals) 顶点法向图标,同时你也可以将显示的法线修改成合适的大小。
实例化顶点当作建模工具
一些很有趣的模型可以用 实例化顶点 和一个标准预设物体构建。例如,一个简单的用立方体挤出的触手。此触手物体 被设置父级到一个棱角球。当父级网格棱角球开启 对齐到顶点法线 ,基础物体触手的方向就会自适应父级网格的顶点法线方向(在示例场景中触手已在编辑模式中在X轴向旋转了 -90° )。
 一条简单的触手设置为平滑着色。 | 父级网格上充满了实例化的触手。 | 对齐到顶点法向 开启后用于对齐实例化的几何体。 |
在前面的例子中,排列的形状和比例现在可以微调了。
要将所有实例化的几何体转化为真正的物体, 只需选择棱角球并单击 物体(Object) ‣ 应用(Apply) ‣ 实例独立化(Make Instances Real) , Shift-Ctrl-A 。要使棱角球和触手合并成一个物体,全选它们并执行 物体(Object) ‣ 合并(Join) , 快捷键 Ctrl-J 。
See also
其它复制方法参考 此处 。


